WE DON'T ACTIVELY WORK ON THIS PROJECT ANYMORE BECAUSE OF A LACK OF FUNDING. THE RESULT OF 1.5 YEARS OF WORK ON THIS PROJECT WAS 1 MASTER'S THESIS AND GRADUATE SCHOOL ADMISSIONS FOR THE UNDERGRADUATES.
The Raptor project (November 17th 2004 - May 1st 2006) was an interdisciplinary effort between the Mechanical Engineering and Electrical Engineering departments at the University of California, Berkeley. The goal of this project is NOT TO JUST BUILD A WALKING ROBOT. There are already robots out there that walk (for example, the now defunct QRIO from Sony). Rather, the goal of this project is to create an autonomous bipedal walker using a biomimetic approach. That is, we want to "mimic biology" - mechanical construction and neural control are the main ideas - to build efficient bipeds. Expanding upon this, here is a summary of our goals:
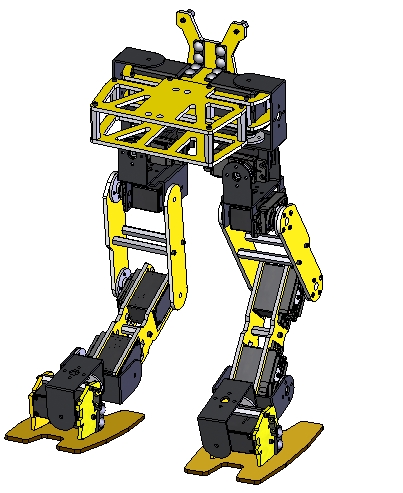
A really cool SolidWorks model of our first robot is shown on the right. Move your mouse over the SolidWorks model on the right to see the detailed modeling of the servos. Currently, we are working with the RoboNova from Hitec. Click on the links at the top of the page for stuff
related to the project. Files on this website are in pdf format. If you
want to contribute to the project, please check under the People link. Please
email comments, suggestions, errors to the webmaster: |
 |
| ©2006 Cal Robotics and University of California, Berkeley | Updated: 05/01/06 |
Optimized for 1024x768 |